Zusammenstellung ausgewählter Bilder zum den verschiedenen Landestellen auf dem Mars, die um weiterführenden Links mit der Möglichkeit des Downloads ergänzt wurden.
-
Viking 2-Landestelle, hochauflösende Aufnahme der Oberfläche
Ein hochauflösendes Foto der Marsoberfläche in der Nähe des Viking Lander 2 zeigt einige Quadratmeter an einer der möglichen Stellen für die Entnahme einer Bodenprobe. Die Probe wird am kommenden Samstag (11. September) von der Schaufel des Landers entnommen und zu den Instrumenten der Raumsonde gebracht. Der Felsen im rechten Vordergrund hat einen Durchmesser von etwa 25 Zentimetern. Die meisten Gesteine scheinen Bläschen oder kleine Löcher zu haben. Solche Gesteine können auf der Erde entweder durch vulkanische Prozesse oder durch Hochgeschwindigkeitseinschläge von Meteoriten entstehen. Einige Bereiche sind heller als andere, was auf das Vorhandensein von zwei Arten von feinkörnigem Material hindeutet, das ebenfalls sowohl durch vulkanische Prozesse als auch durch Einschläge entstehen kann. Ein nahegelegener großer Einschlagskrater mit dem Namen Mie könnte die Quelle der Felsen und des feinkörnigen Materials am Landeplatz sein.
Bild: NASA/JPL
-
Viking 1-Landestelle, erste Aufnahme von der Oberfläche wenige Minuten nach der Landung
Dies ist das erste Foto, das jemals von der Oberfläche des Planeten Mars aufgenommen wurde. Es wurde von Viking 1 nur wenige Minuten nach der erfolgreichen Landung der Raumsonde am frühen Morgen aufgenommen. Die Mitte des Bildes ist etwa 1,4 Meter von der Kamera Nr. 2 des Viking Landers entfernt. Wir sehen sowohl Felsen als auch feinkörniges Material –Sand oder Staub. Viele der kleinen Felsen im Vordergrund sind flach mit kantigen Facetten. Mehrere größere Felsen weisen unregelmäßige Oberflächen mit Gruben auf und der große Felsen oben links zeigt sich mit sich kreuzenden linearen Rissen. Von diesem Felsen aus erstreckt sich ein vertikales, lineares, dunkles Band in Richtung der Kamera, das möglicherweise auf eine einminütige partielle Verdunkelung der Landschaft durch Wolken oder Staub zurückzuführen ist, die sich zwischen der Sonne und der Oberfläche befinden. In Verbindung mit einigen der Felsen gibt es offensichtliche Anzeichen für den Windtransport von körnigem Material. Der große Felsen in der Mitte hat einen Durchmesser von etwa 10 Zentimetern und weist drei raue Facetten auf. Rechts unten befindet sich ein Felsen in der Nähe eines glatten Teils der Marsoberfläche, der wahrscheinlich aus sehr feinkörnigem Material besteht. Es ist möglich, dass der Felsen während der Abstiegsmanöver von Viking 1 bewegt wurde und dabei das feinkörnigere Basissubstrat freigelegt hat; oder dass sich das feinkörnige Material neben dem Felsen angesammelt hat. Es gibt eine Reihe weiterer Furchen und Vertiefungen sowie Stellen mit feinkörnigem Material an anderen Stellen des Bildes. Rechts sehen Sie einen Teil von Footpad #2. Kleine Mengen feinkörnigen Sandes und Staubes sind in der Mitte der Trittfläche in der Nähe der Strebe zu sehen und wurden bei der Landung abgelagert. Der Schatten links von der Landefläche zeigt deutlich Details, die auf die Streuung des Lichts aus der Marsatmosphäre oder von der Raumsonde zurückzuführen sind, da der Marshimmel das Licht in die Schattenbereiche streut.
Bild: NASA/JPL
-
Erstes Panorama der Viking Lander 1-Landestelle
Erster Panoramablick von Viking 1 von der Marsoberfläche aus. Die unscharfe Komponente des Raumschiffs links in der Mitte ist das Gehäuse für den Viking-Probenarm, der noch nicht ausgefahren ist. Die parallelen Linien am Himmel sind ein Artefakt und keine echten Merkmale. Die Veränderung der Helligkeit vom Horizont zum Zenit und nach rechts (Westen) wird in diesem Bild, das am späten Marsnachmittag aufgenommen wurde, jedoch genau wiedergegeben. Am Horizont auf der linken Seite befindet sich ein plateauartiger Vorsprung, der viel heller ist als das Material im Vordergrund zwischen den Felsen. Die Horizonterhebungen sind etwa drei Kilometer entfernt. Links ist eine Ansammlung von feinkörnigem Material zu sehen, das an Sanddünen erinnert. Die dunklen, gewundenen Markierungen im linken Vordergrund sind unbekannten Ursprungs. Auf der hügeligen Erhebung am Horizont rechts sind einige nicht identifizierte Formen zu erkennen. Eine horizontale Wolkenschicht ist auf halbem Weg vom Horizont zum oberen Bildrand zu erkennen. Links ist die Antenne mit geringer Verstärkung für den Empfang von Befehlen von der Erde zu sehen. Die Erhebungen am oder in der Nähe des Horizonts könnten die Ränder entfernter Einschlagskrater darstellen. Rechts im Vordergrund sind Farbkarten für die Kalibrierung der Landerkamera, ein Spiegel für das Viking-Experiment zu den magnetischen Eigenschaften und ein Teil eines Gitters auf der Oberseite des Landerkörpers zu sehen. Rechts oben befindet sich die Parabolantenne mit hoher Verstärkung für die direkte Kommunikation zwischen dem gelandeten Raumschiff und der Erde. Am rechten Rand befindet sich ein Feld aus glattem, feinkörnigem Material, das eine gewisse Wellenstruktur aufweist und möglicherweise der Anfang eines großen Dünenfeldes rechts im Bild ist, das sich mit den Dünen links oben in diesem 300°-Panorama verbindet. Einige der Felsen scheinen auf der einen Seite unterhöhlt und auf der anderen Seite teilweise von Flugsand begraben zu sein.
Bild: NASA/JPL
-
Panorama der Viking 2-Landestelle mit Teilen der Sonde im Vordergrund
Diese felsige Panoramaszene ist das zweite Bild der Marsoberfläche, das von Viking Lander 2 kurz nach der Landung am 3. September aufgenommen wurde. Der Standort befindet sich auf einer nördlichen Ebene des Mars, etwa bei 48 nördlicher Breite und 226 westlicher Länge, die als Utopia Planitia bekannt ist. Das Bild hat einen Azimut von etwa 330 Grad. Die Oberfläche ist bis zum Horizont mit Felsen übersät, die bis zu mehreren Metern groß sein können. Einige Felsen mit vielen Vertiefungen ähneln Fragmenten von poröser vulkanischer Lava. Andere Felsen weisen Rillen auf, die möglicherweise durch vom Wind verwehten Sand und Staub erodiert wurden. Obwohl zwischen den Felsblöcken feinkörniges Material zu sehen ist, sind keine Sanddünen zu erkennen. Die Neigung des östlichen Horizonts in der Mitte ist eine Illusion, die durch eine 8-Grad-Neigung des Landers nach Westen verursacht wird. In Wirklichkeit ist das Gelände ebener als am Standort von Viking 1. Der Horizont auf der linken Seite des Panoramas (Nordwesten) erscheint strukturlos, was darauf hindeutet, dass er mehrere Kilometer entfernt sein könnte. Der Himmel in der Mitte (Osten) ist hell, weil die Sonne um 10 Uhr Marszeit über, aber außerhalb des Bildes war. Auf der rechten Seite (Südosten) deuten die Felsen, die sich als Silhouette von der Skyline abheben, darauf hin, dass der Horizont viel näher ist, wahrscheinlich aufgrund einer leichten Erhebung in diesem Bereich des Geländes. An der kreisrunden Hochantenne auf der rechten Seite haften Klumpen aus feinkörnigem Material, von denen einige nach unten gerutscht zu sein scheinen, während die Kamera das Gebiet absucht. Ganz rechts sind die Streifen dadurch entstanden, dass die Kamera weiter gescannt hat, während sie sich im Azimut nicht mehr bewegte. Jede Bewegung oder andere Veränderung in der Szene würde sich als Veränderung der aufeinanderfolgenden Linien zeigen.
Bild: NASA/JPL
-
Viking 2-Landestelle, hochauflösende Aufnahme der Umgebung mit Spuren von Frost
Dieses hochauflösende Foto der Marsoberfläche wurde von Viking Lander 2 am 18. Mai 1979 an seinem Landeplatz Utopia Planitia aufgenommen und von Viking Orbiter 1 am 7. Juni zur Erde übertragen. Es zeigt eine dünne Schicht aus Wassereis auf den Felsen und dem Boden. Der Zeitpunkt, zu dem der Frost auftrat, entspricht fast genau dem Zeitpunkt, zu dem sich der Frost vor einem Marsjahr (23 Erdmonate) bildete. Danach blieb er etwa 100 Tage lang auf der Oberfläche. Die Wissenschaftler glauben, dass Staubpartikel in der Atmosphäre Teile von festem Wasser aufnehmen. Diese Kombination ist nicht schwer genug, um sich auf dem Boden abzusetzen. Aber Kohlendioxid, das 95 Prozent der Marsatmosphäre ausmacht, gefriert und haftet an den Partikeln, so dass sie schwer genug werden, um zu sinken. Die von der Sonne erwärmte Oberfläche verdampft das Kohlendioxid und gibt es in die Atmosphäre zurück, wobei das Wasser und der Staub zurückbleiben. Das auf diesem Bild zu sehende Eis, das sich vor einem Jahr auf dem Mars gebildet hat, ist extrem dünn, vielleicht nicht mehr als ein Tausendstel eines Inch dick.
Bild: NASA/JPL
-
Rover Sojourner auf der noch eingerollten Rampe auf Mars Pathfinder
Der Rover Sojourner und die nicht ausgefahrenen Rampen an Bord der Raumsonde Mars Pathfinder sind auf diesem Bild zu sehen, das der Imager for Mars Pathfinder (IMP) am 4. Juli (Sol 1) aufgenommen hat. Dieses Bild wurde um die durch die Parallaxe verursachte Krümmung korrigiert. Der Mikrorover Sojourner ist an einem Hüllemblatt eingeklinkt und wurde noch nicht entfaltet. Bei den Rampen handelt es sich um zwei ausfahrbare Metallrollen, die dem Rover eine Spur bieten, wenn er langsam vom Lander über die entleerten Airbags des Raumfahrzeugs auf die Marsoberfläche rollt. Die Pathfinder-Wissenschaftler werden dieses Bild nutzen, um festzustellen, ob es sicher ist, die Rampen auszufahren. Eine oder beide Rampen werden ausgefahren, und dann werden die Wissenschaftler entscheiden, ob der Rover entweder die vordere oder die hintere Rampe für seinen Abstieg benutzen wird.
Bild: NASA/JPL
-
360°-Panorama der Mars Pathfinder-Landestelle
Dies ist eine "geometrisch verbesserte, farbverstärkte" Version des 360-Grad-Panoramas, das bisher als "Gallery Pan" bekannt war. Es ist das erste zusammenhängende, einheitliche Panorama, das vom Imager for Mars Pathfinder (IMP) im Laufe der Sols 8, 9 und 10 aufgenommen wurde. Verschiedene Regionen wurden an den drei Marstagen zu unterschiedlichen Zeiten aufgenommen, um für alle Bereiche des Panoramas einheitliche Licht- und Schattenverhältnisse zu erhalten.
Links ist ein Hüllenblatt des Landers und ein Metallmast zu sehen, der ein Teil der Low-Gain-Antenne ist. Die Fehlregistrierung der Antenne und anderer Merkmale des Landers ist auf die Parallaxe im extremen Vordergrund zurückzuführen. Am Horizont sind die doppelten "Twin Peaks" zu sehen, etwa 1-2 Kilometer entfernt. Der Felsen "Couch" ist der dunkle, gewölbte Felsen rechts von "Twin Peaks". Ein weiteres Lander-Blatt befindet sich links in der Mitte und zeigt die vollständig ausgefahrene vordere Rampe ganz links und die hintere Rampe rechts, über die der Rover Sojourner am 5. Juli auf die Marsoberfläche hinabgestiegen ist. Unmittelbar links von der hinteren Rampe befindet sich der Felsen "Barnacle Bill", den die Wissenschaftler als andesitisch eingestuft haben, was möglicherweise darauf hindeutet, dass es sich um ein vulkanisches Gestein (einen echten Andesit) oder ein physikalisches Gemisch von Partikeln handelt. Gleich hinter Barnacle Bill führen die Spuren des Rovers zu Sojourner, der mit seinem Alpha-Protonen-Röntgenspektrometer (APXS) den großen Felsen "Yogi" untersucht. Yogi, der nur wenig Quarz enthält, scheint primitiver zu sein als Barnacle Bill und ähnelt mehr den auf der Erde vorkommenden Basalten.
Bild: NASA/JPL
-
Teile des Viking Lander 2 mit der Umgebung im Hintergrund
Das mit Felsbrocken übersäte Feld roter Felsen reicht bis zum Horizont, knapp zwei Meilen von Viking 2 auf der Ebene Utopia Planitia des Mars entfernt. Wissenschaftler glauben, dass die Farben der Marsoberfläche und des Himmels auf diesem Foto ihre wahren Farben darstellen. Feine Partikel von rotem Staub haben sich auf der Oberfläche des Raumschiffs abgesetzt. Die lachsfarbene Färbung des Himmels wird durch Staubpartikel verursacht, die in der Atmosphäre schweben. Farbkalibrierungskarten für die Kameras sind an drei Stellen auf der Raumsonde angebracht. Beachten Sie das blaue Sternenfeld und die roten Streifen der Flagge. Die kreisförmige Struktur oben ist die auf die Erde gerichtete Antenne mit hoher Verstärkung. Viking 2 landete am 3. September 1976, etwa 4600 Meilen von seinem Zwilling Viking 1 entfernt, der am 20. Juli aufsetzte.
Bild: NASA/JPL
-
Spirit-Landestelle, freigelegtes, geschichtetes Gestein bei Home Plate
In den letzten Wochen hat Spirit die spektakulären Gesteinsschichten auf der "Home Plate" untersucht. Der Rover ist auf dem Weg zum "McCool Hill" um den nördlichen und östlichen Rand der Home Plate herumgefahren. Vor seiner Abreise nahm Spirit dieses Bild auf, das einige der komplexesten Schichtmuster zeigt, die bisher an diesem Ort zu sehen waren.
Die geschichtete Natur dieser Gesteine stellt das Rover-Team vor neue Fragen. Zusätzlich zu ihren chemischen Eigenschaften, die die Wissenschaftler mit den Spektrometern von Spirit untersuchen können, zeichnen diese Gesteine eine detaillierte Geschichte der physikalischen Eigenschaften auf, die sie gebildet haben. In der Mitte dieses Bildes fällt eine Gruppe von Schichten nach rechts hin ab. Die Schichten über und unter dieser Gruppe sind eher horizontal. Dort, wo sich Schichten mit unterschiedlicher Ausrichtung überschneiden, sind andere Schichten abgeschnitten. Dies deutet darauf hin, dass bei der Ablagerung dieser Schichten komplexe Muster von abwechselnder Erosion und Ablagerung auftraten. Ähnliche Muster finden sich auch in einigen Sedimentgesteinen auf der Erde. Die physikalischen Beziehungen zwischen den verschiedenen Schichten, die auf der Home Plate freigelegt wurden, sind ein entscheidender Beweis für das Verständnis der Entstehung dieser Marsgesteine. Die Wissenschaftler vermuten, dass die Gesteine auf der Home Plate nach einer Vulkanexplosion oder einem Einschlag entstanden sind, und sie untersuchen die Möglichkeit, dass auch der Wind eine Rolle bei der Umverteilung von Materialien nach einem solchen Ereignis gespielt haben könnte
Bild: NASA/JPL-Caltech/Cornell
-
Twin Peaks südwestlich der Mars Pathfinder-Landestelle
Die Twin Peaks sind mittelgroße Hügel im Südwesten des Mars-Pathfinder-Landeplatzes. Sie wurden auf den ersten Panoramabildern entdeckt, die die IMP-Kamera am 4. Juli 1997 aufnahm, und später auf Bildern des Viking Orbiters identifiziert, die vor über 20 Jahren aufgenommen wurden. Die Gipfel sind etwa 30-35 Meter hoch. North Twin ist etwa 860 Meter von der Landefähre entfernt und South Twin ist etwa einen Kilometer entfernt. Die Szenerie umfasst Geröllkämme und Senken oder 'Buckel' aus Flutschutt, die von einigen Dutzend Metern Entfernung zum Lander bis zur Höhe des South Twin Peak reichen.
Die zusammengesetzten Farbbilder, aus denen dieses 'Left-Eye'-Bild besteht, bestehen aus 8 Bildern, die mit verschiedenen Farbfiltern aufgenommen wurden. Diese wurden um 500% vergrößert und dann mit Adobe Photoshop zusammengefügt, um ein panchromatisches Bild mit Superauflösung zu erzeugen, das schärfer ist als ein einzelnes Bild. Dieses panchromatische Bild wurde dann mit den rot, grün und blau gefilterten Bildern aus derselben Sequenz koloriert. Die Farbbalance wurde so angepasst, dass sie sich der wahren Farbe des Mars annähert.
Bild: NASA/JPL
-
Früher Morgen an der Viking 1-Landestelle in Chryse Planitia
Während der Viking-Mission hat das Kamerasystem des Viking Landers viele hochauflösende Bilder der Chryse Planitia aufgenommen. Anhand einzelner Kameraereignisse, die an vielen Tagen während der Mission stattfanden, wurden Computermosaike für den Ort erstellt, wie er von jeder der beiden Kameras an Bord des Raumschiffs gesehen wurde. Von Chryse Planitia wurden zwei Sätze von Mosaiken erstellt: ein Paar für die Bilder von Kamera 1 und 2, die am frühen Morgen aufgenommen wurden, und ein Paar für die Bilder von Kamera 1 und 2, die am Nachmittag aufgenommen wurden.
Jede vollständige Mosaikszene erstreckt sich über 342,5 Grad im Azimut und von etwa 5 Grad über dem Horizont bis 60 Grad darunter. Ein komplettes Mosaik enthält etwa 15 Millionen Bildelemente (Pixel). Dieses Mosaik wurde am frühen Morgen (14:00-15:30 Uhr) vom Kamera-1-System auf Viking Lander 1 erstellt.
Bild: NASA/JPL
-
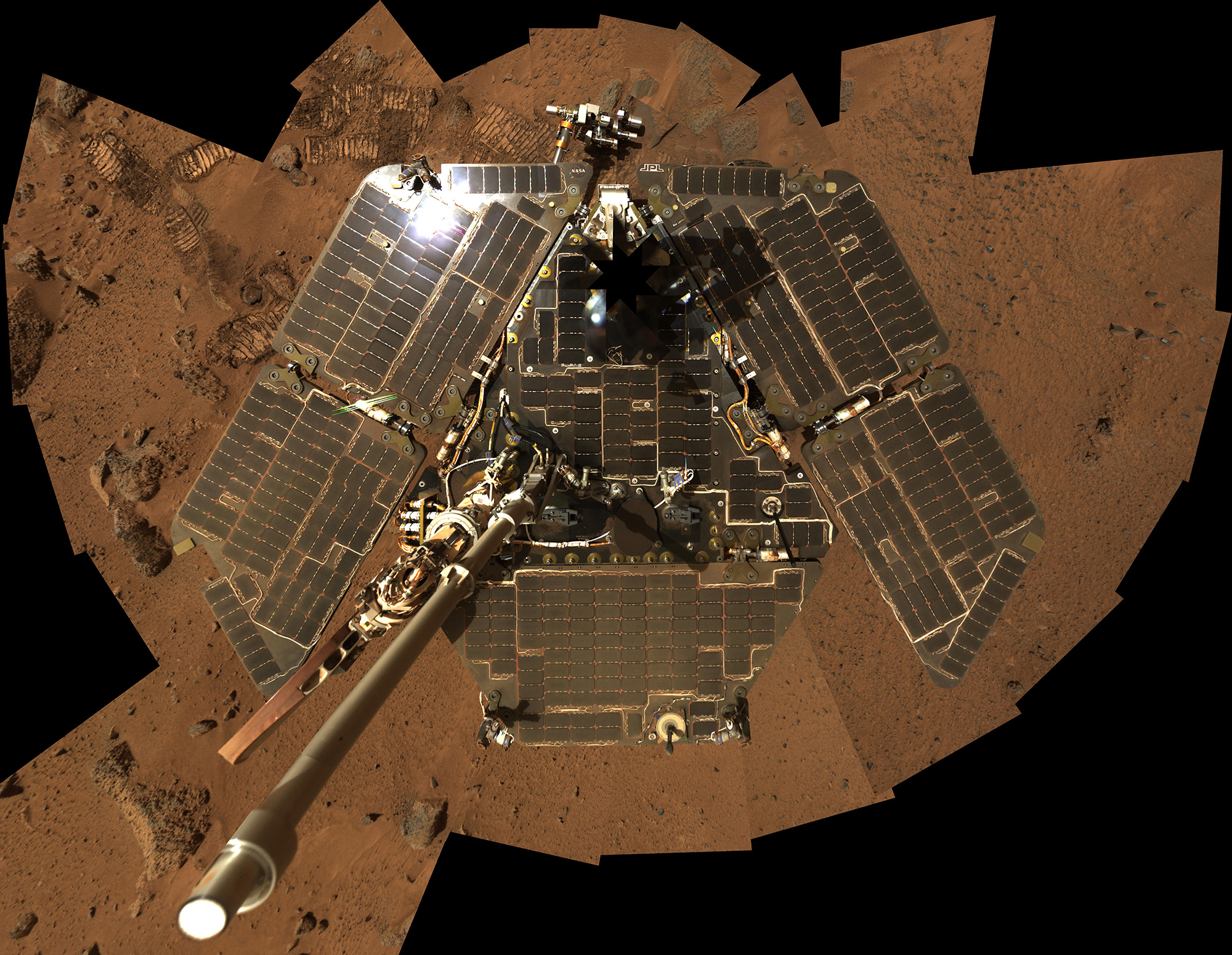
"Selbstproträt" des Mars Exploration Rovers Spirit
Das jüngste Selbstporträt des Mars Exploration Rover Spirit der NASA zeigt die Sonnenkollektoren, die noch immer im Sonnenlicht des Mars glänzen und nur eine dünne Staubschicht tragen, zwei Jahre nachdem der Rover gelandet ist und mit der Erforschung des roten Planeten begonnen hat. Die Panoramakamera von Spirit nahm dieses Mosaik von Bildern am 586. Sol oder Marstag der Erkundung (27. August 2005) auf, als Teil eines Mammutprojekts, das zum größten Panorama führte, das Spirit je aufgenommen hat. Dieses Bild ist eine Teilmenge dieses Panoramas und zeigt nur den Rover. Die hier verwendete vertikale Projektion bietet die beste Sicht auf das Rover-Deck selbst, obwohl sie den Boden und die Antennen etwas verzerrt.
Bei diesem Bild handelt es sich um eine annähernde Echtfarbendarstellung, die Bilder kombiniert, die durch die 600-Nanometer-, 530-Nanometer- und 480-Nanometer-Filter der Kamera aufgenommen wurden.
Bild: NASA/JPL-Caltech/Cornell
-
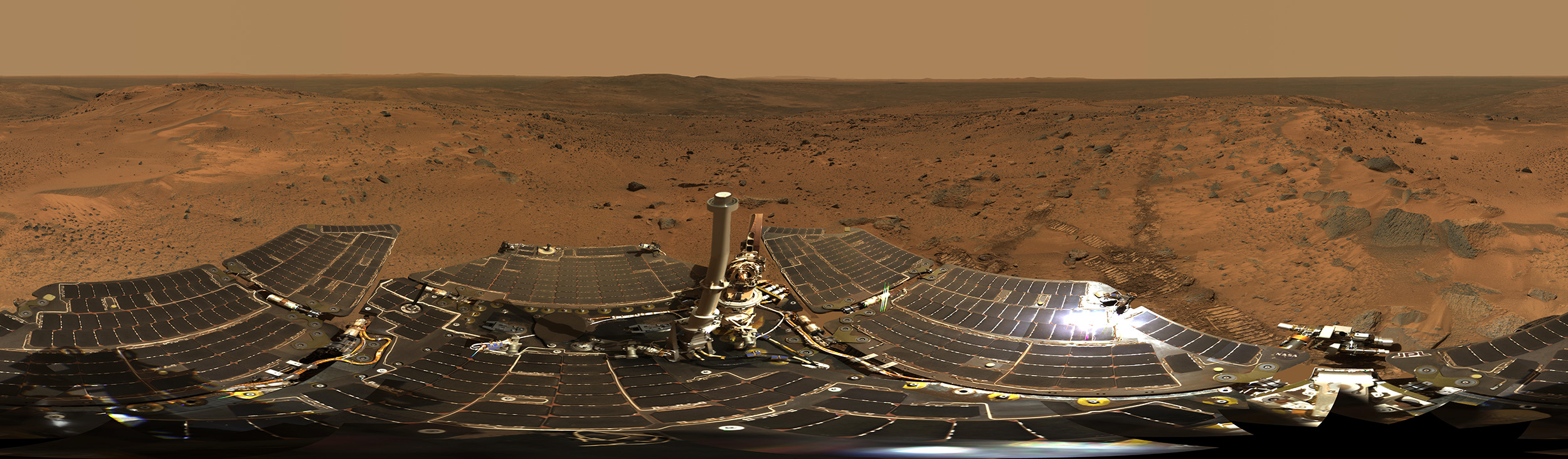
360°-"Husband Hill Summit"-Panorama mit dem Rover Spirit im Vordergrund
Die Panoramakamera auf dem Mars Exploration Rover Spirit der NASA nahm die Hunderte von Bildern auf, die zu dieser 360-Grad-Ansicht, dem "Husband Hill Summit"-Panorama, kombiniert wurden. Die Bilder wurden auf den Sols 583 bis 586 (24. bis 27. August 2005) von Spirit aufgenommen, kurz nachdem der Rover den Gipfel des "Husband Hill" im Gusev-Krater des Mars erreicht hatte. Dies ist das größte Panorama, das bisher von Spirit oder Opportunity aufgenommen wurde. Die Panoramakamera hat 653 Einzelbilder in 6 verschiedenen Filtern aufgenommen, die das Deck des Rovers und die gesamten 360 Grad der Felsen und Böden auf der Oberfläche umfassen, die für die Kamera aus dieser Position sichtbar sind. Dies ist das erste Mal, dass die Kamera verwendet wurde, um das gesamte Roverdeck und die sichtbare Oberfläche von der gleichen Position aus aufzunehmen. Das Zusammenfügen aller Bilder war aufgrund der großen Unterschiede in der Auflösung und der Parallaxe in der Szene sehr aufwändig.
Das Bild ist eine annähernd farbgetreue Wiedergabe unter Verwendung der 750-Nanometer-, 530-Nanometer- und 480-Nanometer-Filter für die Oberfläche und der 600-Nanometer- und 480-Nanometer-Filter für das Rover-Deck. Die Übergänge zwischen den Bildern wurden aus dem Himmelsbereich des Mosaiks entfernt, um die Aussicht, die ein Mensch auf dem Mars sehen würde, besser zu simulieren.
Bild: NASA/JPL-Caltech/Cornell
-
Spirit-Landestelle, Stein Adirondack in annähernder Echtfarbe
Dieses ungefähre Echtfarbenbild, das von der Panoramakamera an Bord des Mars Exploration Rover Spirit aufgenommen wurde, zeigt "Adirondack", den ersten Zielfelsen des Rovers. Spirit durchquerte das sandige Marsterrain im Gusev-Krater, um am Sonntag, den 18. Januar 2004, nur drei Tage nach dem erfolgreichen Absetzen des Rovers, vor dem fußballgroßen Felsen anzukommen. Der Felsen wurde als erstes Ziel von Spirit ausgewählt, weil seine staubfreie, flache Oberfläche ideal zum Schleifen geeignet ist. Saubere Oberflächen eignen sich auch besser für die Untersuchung der oberen Beschichtung eines Gesteins. Die Wissenschaftler benannten den kantigen Felsen nach der Adirondack-Bergkette in New York. Das Wort Adirondack ist indianisch und bedeutet "Sie der großen Felsen".
Bild: NASA/JPL/Cornell
-
Spirit-Landestelle im Krater Gusev mit Lander Columbia Memorial Station
Dieses von der Panoramakamera an Bord des Mars Exploration Rover Spirit aufgenommene Bildmosaik zeigt den Landeplatz des Rovers, die Columbia Memorial Station, im Gusev-Krater auf dem Mars. Dieser spektakuläre Blick könnte die gesamte Reise von Spirit vom Landeplatz bis zu seinem möglichen Endziel in Richtung der östlichen Hügel zusammenfassen. Auf seinem Weg wird der Rover 250 Meter in nordöstlicher Richtung zu einem großen Krater mit einem Durchmesser von etwa 200 Metern fahren, dessen Kamm links auf diesem Bild zu sehen ist. Rechts sind die östlichen Hügel zu sehen, etwa 3 Kilometer vom Lander entfernt. Das Bild wurde am 16. Marstag, oder Sol, der Mission aufgenommen (18./19. Januar 2004). Ein Teil der Sonnenkollektoren von Spirit ist im Vordergrund zu sehen. Die Daten der Grün-, Blau- und Infrarotfilter der Panoramakamera wurden kombiniert, um dieses Bild in annähernd echten Farben zu erstellen.
Bild: NASA/JPL/Cornell
-
Opportunity-Landestelle mit hellem freigelegten Gestein
Dieses hochauflösende Bild, das von der Panoramakamera des Mars Exploration Rover Opportunity aufgenommen wurde, zeigt einen Teil des rätselhaften Gesteinsaufschlusses, auf dessen Untersuchung die Wissenschaftler sehnsüchtig warten. Derzeit befindet sich Opportunity auf seinem Lander und blickt nach Nordosten; der Aufschluss liegt im Nordwesten. Diese geschichteten Felsen sind nur 10 Zentimeter hoch und es wird vermutet, dass es sich entweder um vulkanische Ascheablagerungen oder um Sedimente handelt, die von Wasser oder Wind getragen wurden. Die Daten der Nahinfrarot-, Blau- und Grünfilter der Panoramakamera wurden kombiniert, um dieses annähernd farbgetreue Bild zu erstellen.
Bild: NASA/JPL/Cornell
-
Umgebung der Spirit-Landestelle Mars mit bröckelndem Stein Mimi
Dieses Farbbild, das von der Panoramakamera des Mars Exploration Rover Spirit auf Sol 40 aufgenommen wurde, zeigt einen ungewöhnlich bröckelnden Felsen namens Mimi. Mimi ist nur eines von vielen Merkmalen in dem Gebiet, das als "Stone Council" bekannt ist. Es sieht jedoch ganz anders aus als alle anderen Gesteine, die Wissenschaftler bisher am Standort des Gusev-Kraters gesehen haben. Das bröckelige Aussehen von Mimi führt die Wissenschaftler zu einer Reihe von Hypothesen. Mimi könnte entweder durch Verschüttung oder durch einen Einschlag unter Druck geraten sein oder es könnte sich um eine Düne handeln, die in einzelne Schichten zementiert wurde, ein Prozess, der manchmal die Einwirkung von Wasser beinhaltet.
Bild: NASA/JPL/Cornell
-
Opportunity-Landestelle mit Aufnahme des Steins McKittrick nach dem Einsatz des Rock Abrasion Tool
Dieses Bild wurde von der vorderen Hazard Avoidance Camera des Mars Exploration Rover Opportunity aufgenommen und zeigt den Erfolg der ersten Zerkleinerung eines Felsens durch den Rover. Das runde, flache Loch, das auf diesem Bild zu sehen ist, befindet sich in einem Felsen namens "McKittrick", der sich im Bereich "El Capitan" des größeren Aufschlusses in der Nähe des Landeplatzes von Opportunity befindet.
Opportunity benutzte sein Gesteinsschleifwerkzeug, um während des 30. Marstages oder Sols seiner Mission (23. Februar 2004) ein Stück Gestein mit einem Durchmesser von 45,5 Millimetern abzuschleifen. Durch das Abschleifen wurde frisches Gestein freigelegt, das von der mikroskopischen Kamera des Rovers und zwei Spektrometern an seinem Roboterarm genau untersucht werden konnte. Das Team von Honeybee Robotics, das das Gesteinsschleifwerkzeug entwickelt hat und betreibt, hat die Tiefe des Schnitts bei "McKittrick" mit 4,4 Millimetern bestimmt.
Bild: NASA/JPL
-
Opportunity-Landestelle, Region Shoemaker's Patio mit blauen Kügelchen in Falschfarben
Dieses Falschfarbenbild, das in einer Region des Felsaufschlusses "Shoemaker's Patio" in der Nähe der Landestelle des Mars Exploration Rover Opportunity aufgenommen wurde, zeigt fein geschichtete Sedimente, die durch Erosion hervorgehoben wurden. Die kugelförmigen Körner oder "Blaubeeren", die über den gesamten Aufschluss verteilt sind, können in einer Reihe mit einzelnen Schichten gesehen werden. Diese Beobachtung deutet darauf hin, dass es sich bei den Kugeln um geologische Merkmale handelt, die als Konkretionen bezeichnet werden und sich in bereits vorhandenen feuchten Sedimenten bilden. Andere kugelförmige Körner wie Impaktkugeln oder vulkanische Lapilli (Materialfragmente mit einer Größe von 2 bis 64 Millimetern, die von einem Vulkan ausgeworfen werden) werden vermutlich mit den Sedimenten abgelagert und würden daher Schichten bilden, die sich von denen der Felsen unterscheiden. Dieses Bild wurde von der Panoramakamera des Rovers am 50. Marstag oder Sol der Mission aufgenommen. Die Daten der Infrarot-, Grün- und Violettfilter der Kamera wurden verwendet, um dieses Falschfarbenbild zu erstellen.
Bild: NASA/JPL/Cornell
-
Blick des Rovers Opportunity in den Krater Victoria
Dieser Blick auf den Victoria-Krater geht von der "Duck Bay" nach Norden in Richtung des dramatischen Vorgebirges "Cape Verde". Die dramatische Klippe aus geschichteten Felsen ist etwa 50 Meter vom Rover entfernt und etwa 6 Meter hoch. Das höhere Vorgebirge dahinter ist etwa 100 Meter entfernt und die Aussicht dahinter erstreckt sich über 400 Meter in die Ferne. Dies ist eine verbesserte Falschfarbendarstellung von Bildern, die von der Panoramakamera (Pancam) auf dem Mars Exploration Rover Opportunity der NASA während des 952. Sols oder Marstages (28. September 2006) unter Verwendung der 750-Nanometer-, 530-Nanometer- und 430-Nanometer-Filter der Kamera aufgenommen wurden.
Bild: NASA/JPL/Cornell
-
Stein Tetl mit Schichten aus unterschiedlichem Material im Krater Gusev, Spirit-Landestelle
Abwechselnde Schichten aus widerstandsfähigerem und weniger widerstandsfähigem Material bilden diesen Teil eines Felsens namens "Tetl" am westlichen Ausläufer der "Columbia Hills" auf dem Mars. Der Mars Exploration Rover Spirit der NASA nahm dieses Bild mit seinem Microscopic Imager am 272. Marstag (7. Oktober 2004) auf. Die Ansicht deckt einen Bereich von etwa 3 Zentimetern (1,2 Zoll) Breite ab. Die Schichten, die weniger erosionsbeständig sind, treten im Vergleich zu den widerstandsfähigeren Schichten zurück. Es sind Körnchen aus scheinbar härterem Material zu sehen, die aus einigen Schichten erodieren. Es gibt mehrere mögliche Ursachen für diese Art der Schichtung. Eine, die Wissenschaftler für Tetl und ähnlich geschichtete Gesteine in Betracht ziehen, ist die mehrfache Einwirkung vulkanischer Asche, die vom Himmel fällt oder über das Land fließt. Eine andere Möglichkeit ist die Ablagerung von Sedimenten aus einem Gewässer.
Bild: NASA/JPL/Cornell
-
Teil des Kraterrandes von Endurance mit Burns Cliff, Rover Opportunity
Der Mars Exploration Rover Opportunity der NASA hat diese Ansicht von "Burns Cliff" aufgenommen, nachdem er direkt an die Basis dieses südöstlichen Teils der inneren Wand des "Endurance Crater" gefahren ist. Die Ansicht kombiniert Bilder, die von Opportunitys Panoramakamera zwischen dem 287. und 294. Marstag (13. bis 20. November 2004) aufgenommen wurden.
Es handelt sich um eine Zusammenstellung von 46 verschiedenen Bildern, die jeweils mit sieben verschiedenen Pancam-Filtern aufgenommen wurden. Es handelt sich um eine annähernd farbgetreue Wiedergabe, die mit den 750-Nanometer-, 530-Nanometer- und 430-Nanometer-Filtern der Panoramakamera erzeugt wurde. Das Mosaik erstreckt sich über mehr als 180 Grad von Seite zu Seite. Aufgrund dieses weiten Blickwinkels scheinen sich die Felswände in Richtung der Kamera auszuwölben. In Wirklichkeit bilden die Wände eine sanft geschwungene, durchgehende Fläche.
Bild: NASA/JPL/Cornell
-
Rand des Kraters Victoria mit Kliff Cape Verde, Rover Opportunity
Dieser Blick auf den Victoria-Krater geht von der "Duck Bay" nach Norden in Richtung des dramatischen Vorgebirges "Cape Verde". Die dramatische Klippe aus geschichteten Felsen ist etwa 50 Meter vom Rover entfernt und ist etwa 6 Meter hoch. Die höhere Landzunge dahinter ist etwa 100 Meter entfernt, und die Aussicht dahinter erstreckt sich über mehr als 400 Meter in die Ferne. Dies ist eine verbesserte Falschfarbendarstellung von Bildern, die von der Panoramakamera (Pancam) auf dem Mars Exploration Rover Opportunity der NASA während des 952. Sols oder Marstages (28. September 2006) unter Verwendung der 750-Nanometer-, 530-Nanometer- und 430-Nanometer-Filter der Kamera aufgenommen wurden.
Bild: NASA/JPL/Cornell
-
Victoria-Krater mit Cape St. Vincent mit einem Band aus hellem Gestein, Rover Opportunity
Dieses Bild, das vom Mars Exploration Rover Opportunity der NASA aufgenommen wurde, zeigt "Cape St. Vincent", eines der vielen Vorgebirge, die aus den Wänden des Victoria-Kraters auf dem Mars herausragen. Das Material an der Spitze des Vorgebirges besteht aus losem, durcheinander geworfenem Gestein, das dann ein Stück weiter unten im Krater abrupt in festes Grundgestein übergeht. Dieser Übergang wird durch ein helles Gesteinsband markiert, das um den gesamten Krater herum sichtbar ist.
Wissenschaftler sagen, dass dieses helle Band die ehemalige Marsoberfläche darstellt, kurz bevor ein Einschlag den Victoria-Krater bildete. Nachdem Opportunity Anfang Juli 2007 begonnen hat, in den Krater hinabzusteigen, wird es das Band an einer zugänglichen Stelle mit einem leichten Abhang sorgfältig untersuchen. Diese Untersuchungen könnten dazu beitragen, festzustellen, ob das hellere Aussehen des Bandes das Ergebnis früherer Wechselwirkungen mit der Marsatmosphäre ist.
Dieses Bild wurde von Opportunitys Panoramakamera am Sol 1167 (6. Mai 2007) aufgenommen. Es ist in Falschfarben dargestellt, um die Unterschiede in den Oberflächenmaterialien hervorzuheben.
Bild: NASA/JPL/Cornell
-
Blick auf Krater Victoria mit Fahrspuren des Rovers Opportunity im Vordergrund
Die beiden Mars Exploration Rover der NASA werden immer schlauer, je älter sie werden. Diese Ansicht von Opportunity zeigt die Spuren eines Antriebs, der mit mehr Autonomie an Bord ausgeführt wurde als bei jedem anderen Antrieb eines Marsrovers.
Opportunity machte diese kurvenreiche, 15,8 Meter lange Fahrt während seines 1.160. Marstages oder Sols (29. April 2007). Er testete dabei eine Navigationsfunktion namens "Field D-star", die es dem Rover ermöglicht, optimale Langstreckenfahrten um Hindernisse herum zu planen, um den direktesten und sichersten Weg zum Ziel der Fahrt zu nehmen. Opportunity und sein Zwilling Spirit verfügten erst im dritten Jahr nach ihrer Landung auf dem Mars im Januar 2004 über diese Fähigkeit. Zuvor konnten sie zwar Gefahren erkennen, wenn sie sich ihnen näherten, und sich dann zurückziehen und einen anderen Winkel ausprobieren, aber sie konnten nicht immer eine sichere Route abseits der Gefahren finden. Field D-Star und einige andere Verbesserungen waren Teil einer neuen Onboard-Software, die 2006 von der Erde hochgeladen wurde. Die Fahrt von Opportunity in Sol 1.160 war ein Feldtest von Field D-Star und nutzte auch mehrere andere Funktionen der Autonomie, einschließlich der visuellen Odometrie, um die tatsächliche Position des Rovers nach jedem Segment der Fahrt zu verfolgen, die Vermeidung von ausgewiesenen Sperrzonen und die Kombination von Informationen aus zwei Sätzen von Stereobildern, um bei der Analyse der Route einen großen Bereich des Geländes zu berücksichtigen.
Bild: NASA/JPL-Caltech/Cornell University
-
Polygonale Strukturen an der Phoenix-Landestelle
Dieses Bild zeigt ein polygonales Muster im Boden in der Nähe des Phoenix Mars Landers der NASA, das dem eisigen Boden in den arktischen Regionen der Erde ähnelt. Phoenix landete am 25. Mai 2008 um 16:53 Uhr pazifischer Zeit (19:53 Uhr östlicher Zeit) auf dem Roten Planeten in einer arktischen Region namens Vastitas Borealis bei 68 Grad nördlicher Breite und 234 Grad östlicher Länge.
Dies ist ein Bild in Annähernd Echtfarben, das kurz nach der Landung vom Surface Stereo Imager der Raumsonde aufgenommen wurde. Es wurde von zwei Farbfiltern abgeleitet, einem violetten 450-Nanometer-Filter und einem infraroten 750-Nanometer-Filter.
Bild: NASA/JPL-Caltech/University of Arizona
-
Mars, Graben "Snow White" mit 16 Löchern der Raspel
Der Phoenix Mars Lander der NASA benutzte die motorisierte Raspel an der Rückseite seines Roboterarms während des 60. Marstages (26. Juli 2008), um eine harte Schicht am Boden eines Grabens zu durchdringen, der informell "Schneewittchen" genannt wird. Diese Ansicht, die vom Surface Stereo Imager des Landers aufgenommen wurde und in annähernd echten Farben dargestellt ist, zeigt den Graben später im selben Sol. Die meisten der 16 Löcher, die eine vier mal vier große Anordnung von Raspeln hinterlassen hat, sind im mittleren Bereich des Bildes zu sehen.
Insgesamt wurden 3 Kubikzentimeter oder etwa ein halber Teelöffel Material in der Schaufel gesammelt. Das Material in der Schaufel wurde sowohl durch die sich drehende Raspel, die das Material durch eine Öffnung an der Rückseite der Schaufel in die Schaufel warf, als auch durch die vordere Klinge der Schaufel, die über den geraspelten Bereich fuhr, um weitere Späne aufzusammeln, eingesammelt.
Bild: NASA/JPL-Caltech/University of Arizona/Texas A&M University
-
Volles Panorama der Phoenix-Landestelle mit dem Lander im Vordergrund
Diese Ansicht kombiniert mehr als 500 Bilder, die aufgenommen wurden, nachdem der Phoenix Mars Lander der NASA auf einer arktischen Ebene bei 68,22 Grad nördlicher Breite und 234,25 Grad östlicher Länge auf dem Mars gelandet war. Das volle Panorama in annähernd echten Farben zeigt die polygonale Musterung des Bodens im Landegebiet, ähnlich den Mustern in Permafrostgebieten auf der Erde. Das Zentrum des Bildes ist der westliche Teil der Szene. In der rechten Hälfte des Bildes sind die Gräben zu sehen, in denen der Roboterarm von Phoenix unterirdisches Material freigelegt hat. Der Meteorologiemast der Raumsonde, der von dem Windmesser gekrönt wird, ragt in den Himmelsbereich des Panoramas hinein.
Bild: NASA/JPL-Caltech/University Arizona/Texas A&M University
-
Phoenix-Lander und Umgebung
Diese Ansicht kombiniert Hunderte von Bildern, die in den ersten Wochen nach der Ankunft des Phoenix Mars Landers der NASA auf einer arktischen Ebene bei 68,22 Grad nördlicher Breite und 234,25 Grad östlicher Länge auf dem Mars aufgenommen wurden. Die Landung erfolgte am 25. Mai 2008. Das Vollkreis-Panorama in annähernd echten Farben zeigt die polygonale Strukturierung des Bodens im Landegebiet, ähnlich wie die Muster in Permafrostgebieten auf der Erde. Das Zentrum des Bildes ist der westliche Teil der Szene. In der rechten Hälfte des Bildes sind die Gräben zu sehen, in denen der Roboterarm von Phoenix unterirdisches Material freigelegt hat. Der Meteorologiemast der Raumsonde, der von dem Windmesser gekrönt wird, ragt in den Himmelsbereich des Panoramas hinein.
Andere Phoenix-Instrumente, das Deck der Landefähre und die beiden Sonnenkollektoren sind ebenfalls zu sehen. Der Roboterarm ist nicht in der Szene zu sehen.
Bild: NASA/JPL-Caltech/University of Arizona/Texas A&M University
-
Selbstporträt des staubbedeckten Rovers Opportunity
Dieses Selbstporträt des Mars Exploration Rover Opportunity der NASA zeigt eine Staubansammlung auf den Sonnenkollektoren des Rovers, während sich die Mission dem fünften Winter auf dem Mars nähert. Der Staub reduziert die Stromversorgung des Rovers und die Mobilität des Rovers ist eingeschränkt, bis der Winter vorbei ist oder der Wind die Panels gereinigt hat. Dies ist ein Mosaik aus Bildern, die von der Opportunity-Panoramakamera (Pancam) während des 2.811. bis 2.814. Marstages oder Sols der Rover-Mission (21. bis 24. Dezember 2011) aufgenommen wurden. In der Ansicht von unten ist der Mast, an dem die Kamera befestigt ist, nicht zu sehen.
Das Porträt kombiniert Aufnahmen, die durch Pancam-Filter mit Wellenlängen von 601 Nanometern, 535 Nanometern und 482 Nanometern gemacht wurden. Es wird in annähernd echten Farben dargestellt, der besten Einschätzung des Kamerateams, wie die Szene aussehen würde, wenn Menschen vor Ort wären und sie mit ihren eigenen Augen sehen könnten.
Bild: NASA/JPL-Caltech/Cornell/Arizona State Univ.
-
Krater Gale mit aufgetragener Landeellipse des Rovers Curiosity
Seit Juni 2012 ist das Ziellandegebiet für die NASA-Mission Mars Science Laboratory die Ellipse, die auf diesem Bild des Gale-Kraters markiert ist. Die Ellipse ist etwa 20 Kilometer lang und 7 Kilometer breit.
Diese Ansicht des Gale-Kraters wurde aus einer Kombination von Daten von drei Mars-Orbitern erstellt. Der Blick geht vom Orbit aus direkt auf den Krater. Der Gale-Krater hat einen Durchmesser von 154 Kilometern. Mount Sharp erhebt sich etwa 5,5 Kilometer über dem Boden des Gale Kraters. Die Schichtung auf dem Mount Sharp deutet darauf hin, dass der Berg ein Überbleibsel einer umfangreichen Reihe von Ablagerungen ist, die sich nach einem massiven Einschlag, der den Gale-Krater vor mehr als 3 Milliarden Jahren erzeugte, gebildet haben. Die Schichten bieten ein Geschichtsbuch mit aufeinanderfolgenden Kapiteln, die die Umweltbedingungen aufzeichnen, als jede Schicht abgelagert wurde.
Das Bild kombiniert Höhendaten der hochauflösenden Stereokamera auf dem Orbiter Mars Express der Europäischen Weltraumorganisation ESA, Bilddaten der Context-Kamera auf dem Mars Reconnaissance Orbiter der NASA und Farbinformationen von Bildern des Viking Orbiters.
Bild: NASA/JPL-Caltech/ESA/DLR/FU Berlin/MSSS
-
Panorama vom Überwinterungsplatz des Rovers Opportunity
Diese 360°-Szene kombiniert 817 Bilder, die von der Panoramakamera (Pancam) auf dem Mars Exploration Rover Opportunity der NASA aufgenommen wurden. Sie zeigt das Terrain, das den Rover umgab, während er während des letzten Winters auf dem Mars vier Monate lang stationär war.
Die Pancam von Opportunity nahm die Bilder zwischen dem 2.811. Marstag oder Sol der Marsoberflächenmission des Rovers (21. Dezember 2011) und Sol 2.947 (8. Mai 2012) auf. Der Standort befindet sich in der Nähe der nördlichen Spitze des "Cape York"-Segments des westlichen Randes des Endeavour-Kraters.
Die hellen, vom Wind verwehten Ablagerungen auf der linken Seite stoßen an den Greeley Haven-Aufschluss. Man kann die Spuren von Opportunity erkennen, die sich von Süden her ausbreiten, mit einer Drehung an Ort und Stelle und anderen Manövern, die von Aktivitäten zur Positionierung des Rovers in Greeley Haven herrühren. Die Spuren haben an einigen Stellen dunklere, darunter liegende Böden freigelegt, indem sie eine dünne, helle Staubschicht durchbrochen haben.
Weitere helle, staubige Ablagerungen sind im Norden, Nordosten und Osten von Greeley Haven zu sehen. Die Ablagerung in der Mitte des Bildes, nördlich von der Winterposition des Rovers, ist ein staubiger Fleck namens "Nordpol". Opportunity fuhr dorthin und untersuchte ihn im Mai 2012 als Beispiel für vom Wind verwehten Marsstaub.
Bild: NASA/JPL-Caltech/Cornell/Arizona State Univ.
-
Panorama von der Position Rocknest, Rover Curiosity
Dieses Panorama ist ein Mosaik aus Bildern, die von der Mastkamera (Mastcam) auf dem NASA Marsrover Curiosity aufgenommen wurden, während der Rover im Oktober und November 2012 an einem Ort namens "Rocknest" arbeitete.
Das Zentrum der Szene, das von Rocknest aus nach Osten blickt, umfasst das Gebiet um den Point Lake. Nachdem die Einzelbilder für diese Szene aufgenommen worden waren, fuhr Curiosity am 18. November 25,3 Meter von Rocknest zum Point Lake. Vom Point Lake aus nimmt die Mastcam Bilder für einen weiteren detaillierten Panoramablick auf das Gebiet weiter östlich auf, um den Forschern zu helfen, mögliche Ziele für die erste Bohrung des Rovers in einen Felsen zu identifizieren.
Bild: NASA/JPL-Caltech/Malin Space Science Systems
-
Adern im Gestein Sheepbed, Rover Curiosity
Dieses Bild eines Aufschlusses an der Fundstelle "Sheepbed", das der NASA-Marsrover Curiosity mit seiner rechten Mastkamera (Mastcam) aufgenommen hat, zeigt gut definierte Adern, die mit weißlichen Mineralien gefüllt sind, die als Kalziumsulfat interpretiert werden.
Diese Adern bilden sich, wenn Wasser durch Brüche zirkuliert und Mineralien an den Seiten des Bruchs ablagert, um eine Ader zu bilden. Diese Adern sind Curiositys erster Blick auf Mineralien, die sich in Wasser gebildet haben, das in einer unterirdischen Umgebung versickert ist. Diese Aderfüllungen sind charakteristisch für die stratigraphisch niedrigste Einheit in der "Yellowknife Bay" - bekannt als Sheepbed Unit.
Die Mastcam hat diese Bilder am 126. Marstag oder Sol der Curiosity-Mission auf dem Mars (13. Dezember 2012) aufgenommen. Die Ansicht deckt einen Bereich von etwa 40 Zentimetern Durchmesser ab.
Bild: NASA/JPL-Caltech/MSSS
-
Schrägschichtung im Gebiet Shaler, Rover Curiosity
Dieses Bild der Mastkamera (Mastcam) auf dem Marsrover Curiosity der NASA zeigt eine schräge Schichtung, die als Querschichtung bekannt ist, in einem Aufschluss namens "Shaler" auf einer Skala von einigen Zehntelmetern oder Dezimetern.
Diese stratigraphische Einheit wird als Shaler-Einheit bezeichnet. Die dezimetergroße Querschichtung in der Shaler-Einheit ist ein Hinweis auf den Sedimenttransport in Flussläufen. Strömungen formen die Sedimente zu kleinen Unterwasserdünen, die stromabwärts wandern. Im Querschnitt zeigt sich diese Wanderung in Form von Schichten, die im Verhältnis zur Horizontalen steil geneigt sind - daher der Begriff "cross-bedding". Die Korngrößen sind hier grob genug, um den Windtransport auszuschließen. Diese Querschichten liegen stratigraphisch über der Gillespie-Einheit in der "Yellowknife Bay" des Gale-Kraters auf dem Mars und sind daher geologisch jünger.
Bild: NASA/JPL-Caltech/MSSS
-
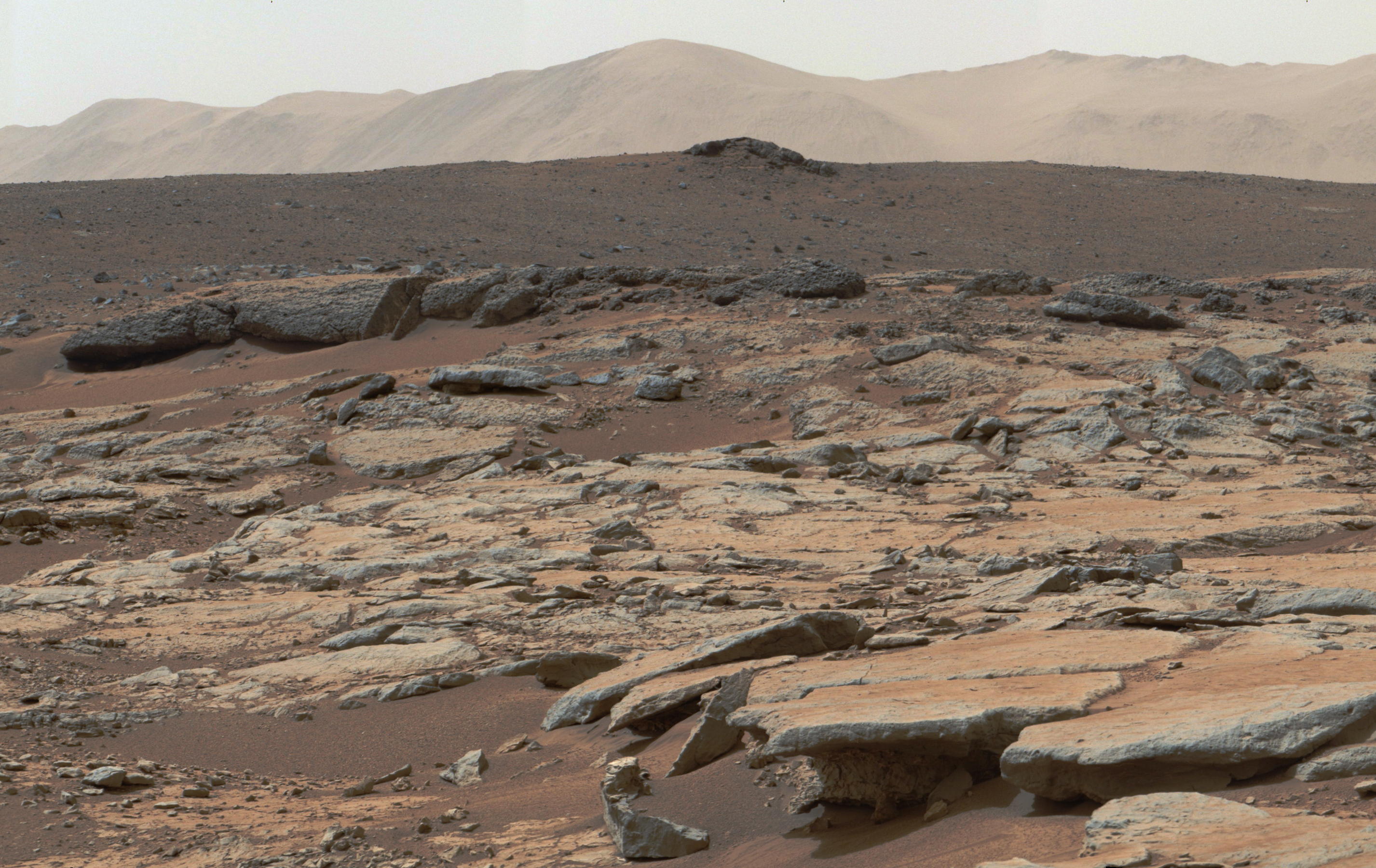
Sedimentäre Ablagerungen im Gebiet Glenelg mit Spuren der Erosion durch Wind, Rover Curiosity
Dieses Mosaik aus Bildern der Mastkamera (Mastcam) auf dem Marsrover Curiosity der NASA zeigt eine Reihe von Sedimentablagerungen im Glenelg-Gebiet des Gale-Kraters aus einer Perspektive in der Yellowknife Bay mit Blick in Richtung West-Nordwest.
Das Wissenschaftsteam von Curiosity schätzt, dass das "Cumberland"-Gestein, das der Rover für eine Probe der Sheepbed-Schlammsteinablagerung (in dieser Szene unten links) angebohrt hat, erst seit etwa 80 Millionen Jahren an der Oberfläche liegt. Die Schätzung basiert auf der Menge bestimmter Gase, die sich in einem Gestein ansammeln, wenn es nahe genug an der Oberfläche ist, um von kosmischer Strahlung bombardiert zu werden. Eine Erklärung für dieses unerwartet junge Alter ergibt sich aus einem verbesserten Verständnis darüber, wie die Schichten erodieren und die darunter liegenden Schichten freilegen. Die Erklärung besagt, dass der Tonstein durch den Abrieb von windverwehtem Sand freigelegt wird. Die Rolle des Windes wird durch die Unterhöhlung der Sheepbed-Schicht unterhalb des Gillespie Lake Sandsteins deutlich.
Die Mastcam nahm die Bilder für dieses Mosaik während des 188. Marstages oder Sols von Curiositys Arbeit auf dem Mars auf (14. Februar 2013). Ein etwa 20 Zentimeter hoher Felsvorsprung am unteren Rand der Szene – wo die Gillespie Lake-Schicht auf die Sheepbed-Schicht trifft – ist etwa 15 Meter von der Position des Rovers entfernt, als die Bilder aufgenommen wurden. Der mittlere Steilhang namens "Point Lake" ist etwa 36 Meter von der Position des Rovers entfernt. Der Aufschluss am nahen Horizont liegt etwa 13 Meter höher als der Sheepbed-Gillespie-Kontakt und ist etwa 240 Meter entfernt.
Bild: NASA/JPL-Caltech/MSSS
-
Mikroskopaufnahme von kleinen Kügelchen nahe Krater Fram, Rover Opportunity
Die kleinen Kügelchen auf der Marsoberfläche in dieser Nahaufnahme befinden sich in der Nähe des Fram-Kraters, den der Mars Exploration Rover Opportunity der NASA im April 2004 besucht hat. Der abgebildete Bereich hat einen Größe von drei mal drei Zentimetern. Die Ansicht stammt von der mikroskopischen Kamera am Roboterarm von Opportunity, wobei die Farbinformationen von der Panoramakamera des Rovers hinzugefügt wurden.
Dies sind Beispiele für die mineralischen Konkretionen, die den Spitznamen "Blaubeeren" tragen. Die Untersuchung der hämatitreichen Konkretionen durch Opportunity während der dreimonatigen Hauptmission des Rovers Anfang 2004 lieferte Beweise für eine frühere wasserreiche Umgebung. Dieses Bild wurde während des 84. Marstages oder Sols der Arbeit des Rovers auf dem Mars (19. April 2004) aufgenommen. Der Standort ist neben dem Fram-Krater, den Opportunity auf seinem Weg vom Eagle-Krater, wo er landete, zum Endurance-Krater passierte, wo er den Rest des Jahres 2004 verbrachte. Ein Kontextbild ist online unter PIA05822.
Bild: NASA/JPL-Caltech/Cornell/USGS
-
Höhere Regionen des Mount Sharp im Krater Gale, Rover Curiosity
Dieses zusammengesetzte Bild mit Blick auf die höheren Regionen des Mount Sharp wurde am 9. September 2015 vom NASA-Rover Curiosity aufgenommen. Im Vordergrund – etwa 3 Kilometer vom Rover entfernt – ist ein langer Bergrücken zu sehen, auf dem es von Hämatit, einem Eisenoxid, nur so wimmelt. Gleich dahinter liegt eine hügelige Ebene, die reich an Tonmineralien ist. Und gleich dahinter befindet sich eine Vielzahl von abgerundeten Hügeln, die alle reich an Sulfatmineralien sind. Die wechselnde Mineralogie in diesen Schichten des Mount Sharp deutet auf eine sich verändernde Umwelt in der Frühzeit des Mars hin, auch wenn sie alle vor Milliarden von Jahren mit Wasser in Berührung gekommen sein müssen. Das Curiosity-Team hofft, diese verschiedenen Gebiete in den kommenden Monaten und Jahren erforschen zu können. Weiter hinten im Bild sind auffällige, hell getönte Felsen zu sehen, die sich in trockeneren Zeiten gebildet haben könnten und nun stark vom Wind erodiert sind.
Die Farben werden so angepasst, dass die Felsen ungefähr so aussehen, als befänden sie sich auf der Erde, um Geologen bei der Interpretation der Felsen zu helfen. Dieser "Weißabgleich" zur Anpassung an die Lichtverhältnisse auf dem Mars gleicht das Fehlen von Blau auf dem Mars übermäßig aus, so dass der Himmel hellblau erscheint und dunkle, schwarze Felsen manchmal einen Blaustich bekommen.
Bild: NASA/JPL-Caltech/MSSS
-
Blick auf den unteren Teil von Mount Sharp mit den Bagnold-Dünen im Vordergrund, Rover Curiosity
Das dunkle Band im unteren Teil dieser Marsszene ist Teil des Dünenfelds "Bagnold Dunes", das den nordwestlichen Rand des Mount Sharp im Gale-Krater säumt. Die Ansicht kombiniert mehrere Bilder, die mit der Mastkamera (Mastcam) auf dem Marsrover Curiosity der NASA am 25. September 2015, während des 1.115sten Marstages oder Sols von Curiositys Arbeit auf dem Mars, aufgenommen wurden. Die Bilder stammen von der Mastcam-Kamera mit dem rechten Auge, die über ein Teleobjektiv verfügt. Der Blick geht in Richtung Süd-Südost.
Der inoffizielle Name für das Dünenfeld ist eine Hommage an den britischen Militäringenieur Ralph Bagnold (1896-1990), einen Pionier in der Erforschung der Art und Weise, wie Winde die Sandpartikel der Dünen auf der Erde bewegen. Das Dünenfeld ist auf Orbitalbildern des Gebiets im Inneren des Gale-Kraters, in dem Curiosity seit der Landung im Jahr 2012 aktiv ist, als dunkles Band zu erkennen.
Dünen sind größer als die vom Wind verwehten Sand- oder Staubkörnchen, die Curiosity und andere Rover zuvor besucht haben.
Bild: NASA/JPL-Caltech/MSSS
-
Erstes Selfie des Landers InSight
Dies ist das erste vollständige Selfie von NASA InSight auf dem Mars. Es zeigt die Sonnenkollektoren und das Deck des Landers. Oben auf dem Deck befinden sich die wissenschaftlichen Instrumente, die Ausleger der Wettersensoren und die UHF-Antenne. Das Selfie wurde am 6. Dezember 2018 (Sol 10) aufgenommen.
Das Selfie besteht aus 11 Bildern, die von der Instrument Deployment Camera am Ellbogen des Roboterarms aufgenommen wurden. Diese Bilder wurden dann zu einem Mosaik zusammengesetzt.
Bild: NASA/JPL-Caltech
-
Ausschnitt aus dem ersten hochaufgelösten Panorama, Rover Perseverance
Dieses aus 79 Einzelbildern zusammengesetzte Mosaik der Mastcam-Z mit 110-mm-Zoom der rechten Kamra stammt aus der ersten hochauflösenden Panoramasequenz der Kamera. Diese Bilder wurden am Nachmittag von Sol 4 (22. Februar 2021) der Mission aufgenommen; ein Sol ist ein Tag auf dem Mars.
Die Kamera wurde angewiesen, diese Bilder aufzunehmen, indem sie den Mast oder "Kopf" um volle 360 Grad um den vom Landeplatz aus sichtbaren Horizont herum scannte. Der obere Teil des entfernten Kraterrandes ist auf einigen Bildern abgeschnitten, um sicherzustellen, dass die Bilder den vorderen Rand des alten Deltas des Jezero-Kraters abdecken, der nur etwa 2 Kilometer vom Rover in der Mitte dieses Panoramas entfernt ist. Bei dieser Entfernung und Brennweite kann die Mastcam-Z Merkmale mit einem Durchmesser von nur 50 Zentimetern entlang der Vorderseite des Deltas auflösen.
Das Mosaik ist nicht weiß ausbalanciert, sondern wird in einer vorläufig kalibrierten Version eines natürlichen Farbkomposits angezeigt, der ungefähr die Farben der Szene simuliert, die wir sehen würden, wenn wir selbst vor Ort wären und sie betrachten würden.
Bild: NASA/JPL-Caltech/ASU/MSSS
-
Blick von Greenheugh Pediment, Rover Curiosity
Diese aus 28 Bildern zusammengesetzte Ansicht des NASA-Rovers Curiosity wurde am 9. April 2020, dem 2.729. Marstag oder Sol der Mission, aufgenommen, nachdem der Rover einen steilen Hang hinaufgefahren war, der Teil einer geologischen Besonderheit namens "Greenheugh Pediment" ist. Im Vordergrund ist die krustige Sandsteinkappe zu sehen, die sich über die gesamte Länge des Giebels erstreckt und an einigen Stellen einen überhängenden Felsvorsprung bildet. In der Mitte befindet sich die "tonhaltige Einheit", eine Region, die eine einzigartige Geschichte über die Geschichte des Wassers auf dem Mount Sharp zu erzählen hat, dem 5 Kilometer hohen Berg, den Curiosity seit 2014 besteigt. In der Ferne am oberen Rand des Bildes ist der Boden des Gale-Kraters zu sehen, der 154 Kilometer breit ist.
Das Panorama wurde von der Mastkamera des Rovers, der Mastcam, aufgenommen. Malin Space Science Systems in San Diego baute und betreibt die Mastcam. Das Jet Propulsion Laboratory der NASA in Südkalifornien, eine Abteilung des Caltech, hat den Curiosity-Rover gebaut und leitet die Mission Mars Science Laboratory für das Science Mission Directorate der Behörde in Washington.
Bild: NASA/JPL-Caltech/MSSS
-
Landestelle des Rovers Persverance "Octavia E. Butler Landing" im Krater Jezero
Die NASA hat den Landeplatz des Perseverance-Rovers "Octavia E. Butler Landing" genannt, nach der Science-Fiction-Autorin Octavia E. Butler. Der Landeplatz ist auf diesem Bild der Kamera des High Resolution Imaging Experiment (HiRISE) an Bord des Mars Reconnaissance Orbiter (MRO) der NASA mit einem Stern markiert.
Ein Hauptziel der Perseverance-Mission auf dem Mars ist die Astrobiologie, einschließlich der Suche nach Anzeichen von altem mikrobiellem Leben. Der Rover wird die Geologie und das Klima des Planeten in der Vergangenheit charakterisieren, den Weg für die Erforschung des Roten Planeten durch den Menschen ebnen und die erste Mission sein, die Marsgestein und Regolith (zerbrochenes Gestein und Staub) sammelt und speichert.
Bild: NASA/JPL-Caltech/University of Arizona
-
Selfie des Rovers Perseverance mit Helikopter Ingenuity
Der Marsrover Perseverance der NASA machte ein Selfie mit dem Ingenuity-Hubschrauber, der auf diesem Bild, das am 6. April 2021, dem 46. Marstag oder Sol der Mission, von der WATSON-Kamera (Wide Angle Topographic Sensor for Operations and eNgineering) am SHERLOC-Instrument (Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals) am Ende des langen Roboterarms des Rovers aufgenommen wurde, etwa 3,9 Meter vom Rover entfernt ist.
Das Selfie von Perseverance mit Ingenuity besteht aus 62 Einzelbildern, die zusammengefügt werden, sobald sie zur Erde gesendet werden. Sie wurden nacheinander aufgenommen, während der Rover auf den Hubschrauber blickte und dann noch einmal, während er auf die WATSON-Kamera schaute. Der Curiosity-Rover nimmt ähnliche Selfies mit einer Kamera an seinem Roboterarm auf.
Image Credit: NASA/JPL-Caltech/MSSS
-
Selbstporträt des Rovers Curiosity vor Mount Mercou
Der Marsrover Curiosity der NASA verwendete zwei verschiedene Kameras, um dieses Selfie vor dem Mont Mercou, einem 6 Meter hohen Felsvorsprung, zu erstellen. Das Panorama besteht aus 60 Bildern, die der Mars Hand Lens Imager (MAHLI) am Roboterarm des Rovers am 26. März 2021, dem 3070. Marstag oder Sol der Mission, aufgenommen hat. Diese wurden mit 11 Bildern kombiniert, die von der Mastcam am Mast oder "Kopf" des Rovers am 16. März 2021, dem 3.060sten Marstag der Mission, aufgenommen wurden.
Das links vom Rover sichtbare Loch ist die Stelle, an der der Bohrer eine Gesteinsprobe mit dem Spitznamen "Nontron" entnommen hat. Das Curiosity-Team gibt den Merkmalen in diesem Teil des Mars Namen aus der Region um das Dorf Nontron im Südwesten Frankreichs.
Bild: NASA/JPL-Caltech/MSSS
-
Helikopter Ingenuity mit frei drehbaren Rotoren
Der Ingenuity-Hubschrauber der NASA hat am 7. April 2021, dem 47. Marstag (Sol) der Mission, seine Rotorblätter entriegelt, so dass sie sich frei drehen können. Die Entriegelung ist einer von mehreren Meilensteinen, die erreicht werden müssen, bevor der Hubschrauber den ersten motorisierten, kontrollierten Flug auf einem anderen Planeten unternehmen kann. Dieses Bild wurde von der Mastcam-Z auf dem Marsrover Perseverance der NASA am folgenden Sol, dem 8. April 2021, aufgenommen.
-
Flacher Hügel Kodiak aus 2,2 km Entfernung, Rover Perseverance
Dieses farbverstärkte Bild des Jezero-Kraters auf dem Mars wurde am 18. April 2021 von der Mastcam-Z an Bord des Perseverance-Rovers der NASA aufgenommen. Der flache Hügel im Vordergrund, der informell "Kodiak" genannt wird, ist 2,2 Kilometer vom Rover entfernt und 250 Meter breit. Er zeigt alte Gesteinsschichten, die auf eine allmähliche Ablagerung von Sedimenten in einem Flussdelta, gefolgt von Überschwemmungen, hinweisen.
Die Farbbänder des Bildes wurden bearbeitet, um den visuellen Kontrast zu verbessern und die Farbunterschiede hervorzuheben.
Bild: NASA/JPL-Caltech/ASU/MSSS
-
Mars Helicopter Ingenuity im "Airfield J"
Der Ingenuity Mars Helicopter der NASA steht auf einer leicht geneigten Fläche mit etwa 6 Grad Neigung in der Mitte des Bildes. Der Standort, "Flugplatz J" (der 10. Flugplatz), befindet sich direkt nördlich des südlichen Rückens der geologischen Einheit "Séítah". Das Instrument Mastcam-Z an Bord des Perseverance-Rovers der NASA nahm dieses Bild am 1. Dezember 2021 auf (dem 279. Marstag oder Sol der Perseverance-Mission), als sich das Drehflügler etwa 295 Meter vom Rover entfernt befand.
Bild: NASA/JPL-Caltech/ASU/MSSS
-
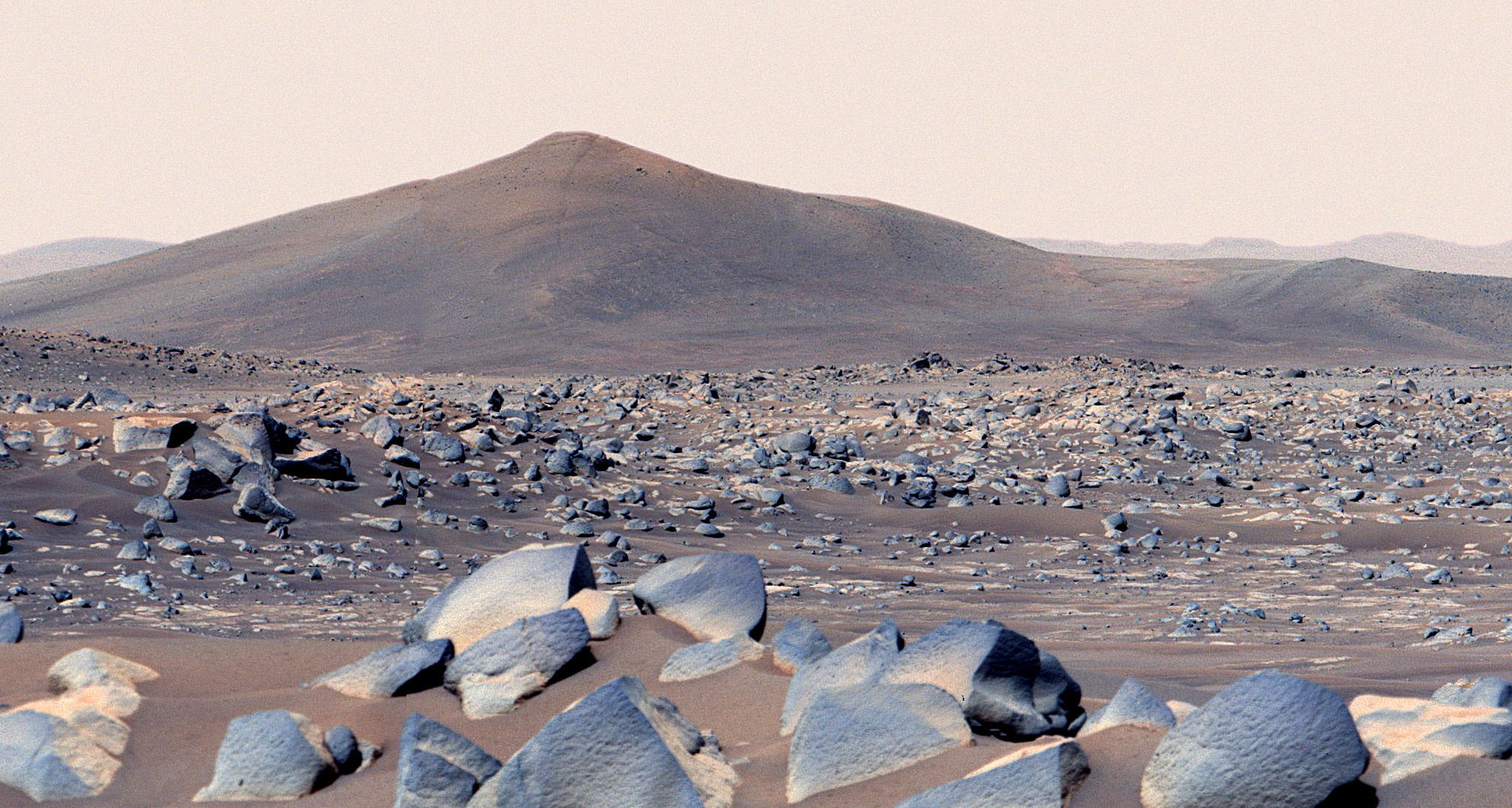
Hügel Santa Cruz im Krater Jezero, Rover Perseverance
Der Marsrover Perseverance der NASA hat am 29. April 2021, dem 68. Marstag oder Sol der Mission, diesen Blick auf einen Hügel im Jezero-Krater des Mars namens "Santa Cruz" aufgenommen. Die durchschnittlich 50 Zentimeter großen Felsbrocken im Vordergrund gehören zu der Art von Felsen, die das Rover-Team "Ch'al" (Navajo-Bezeichnung für "Frosch", ausgesprochen "chesh") genannt hat. Perseverance wird etwa in der nächsten Woche in das Gebiet zurückkehren.
Dieses Farbmosaik besteht aus mehreren Bildern. Es wurde aus den Ansichten der linken und rechten Kamera des Kamerasystems Mastcam-Z von Perseverance erstellt, wobei die Szene zu einer einzigen, breiteren Ansicht zusammengefügt wurde. Der Hügel Santa Cruz ist ein möglicher erodierter Überrest des westlichen Deltas des Jezero-Kraters. Der Hügel ist etwa 50 Meter hoch und befand sich etwa 2,5 Kilometer östlich des Rovers, als das Foto vom "Van Zyl Overlook" aus aufgenommen wurde.
Bild: NASA/JPL-Caltech/ASU/MSSS